|
PIPER
1.0.1
|
|
PIPER
1.0.1
|
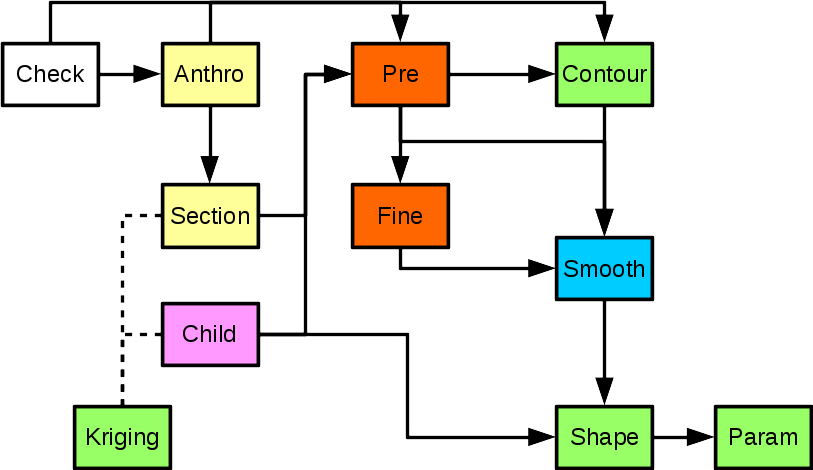
The following modules are available in the application:
Several modules are typically used (chained) to perform a transformation. An overview of the articulation of the modules and functionalities for positioning and scaling is provided below. A few examples of workflows are also provided in the Workflow Examples.
HBM Scaling approaches seem more widespread in the literature than positioning approaches. The PIPER framework provides several tools than greatly can help with HBM scaling mainly based on anthropometric dimensions or landmarks (unfortunately, no module using Statistical Shape Models could be integrated yet) The main modules provided include:
Positioning finite element Human Body Models (HBM) for safety is a challenging task. To the contrary of dummies, applying a succession of rotations and translations is not possible because the HBM includes non robotic joints with complex articular contacts because soft tissues need to be deformed along. Because of this, HBM positioning is typically performed by finite element simulation. These can be time consuming to set up and to run. Beyond that, the properties of the HBM were typically selected for their response at high acceleration levels and may not be appropriate for physiological motion or low deceleration. Furthermore, postural preferences and muscular reactions also affect the posture .
The PIPER framework aims to propose some alternative methodologies that can be used along current approaches. Positioning in PIPER typically starts with the Pre-Positioning Module (or pre-positioning). The HBM is automatically transformed into a simplified model with a limited number of degrees of freedom that can be used in physics-based interactive simulation. Despite being simplified and interactive, the simulation can among others account for collisions between bones (to prevent penetration, limit range of motion, ...) and provide a rough transformation of the soft tissues.
The pre-positioning process is the place where the user can input its various constraints, weight them, and compute a plausible posture (for the skeleton in particular). Constraints could also include a priori knowledge such as physiological observations or postural preferences which are not classical mechanical parameters. For now, physiological descriptions of the spinal curvature (called Spine controller) can interact with the model (e.g. collision detection on the vertebrae) during postural change.
Several options are then possible to transform the HBM using this pre-position as the target:
In all cases, the use of the Transformation smoothing after positioning was found to greatly improve the results. In some cases (for smaller motion), the pre-position may be directly used and lead to a plausible and runnable model after smoothing.
In all cases, smoothing functionalities can be used to improve the HBM quality (Smoothing module).
 1.8.10
1.8.10 
